Embedded Systems — Final Project
Autonomous
Surveillance.
Anywhere.
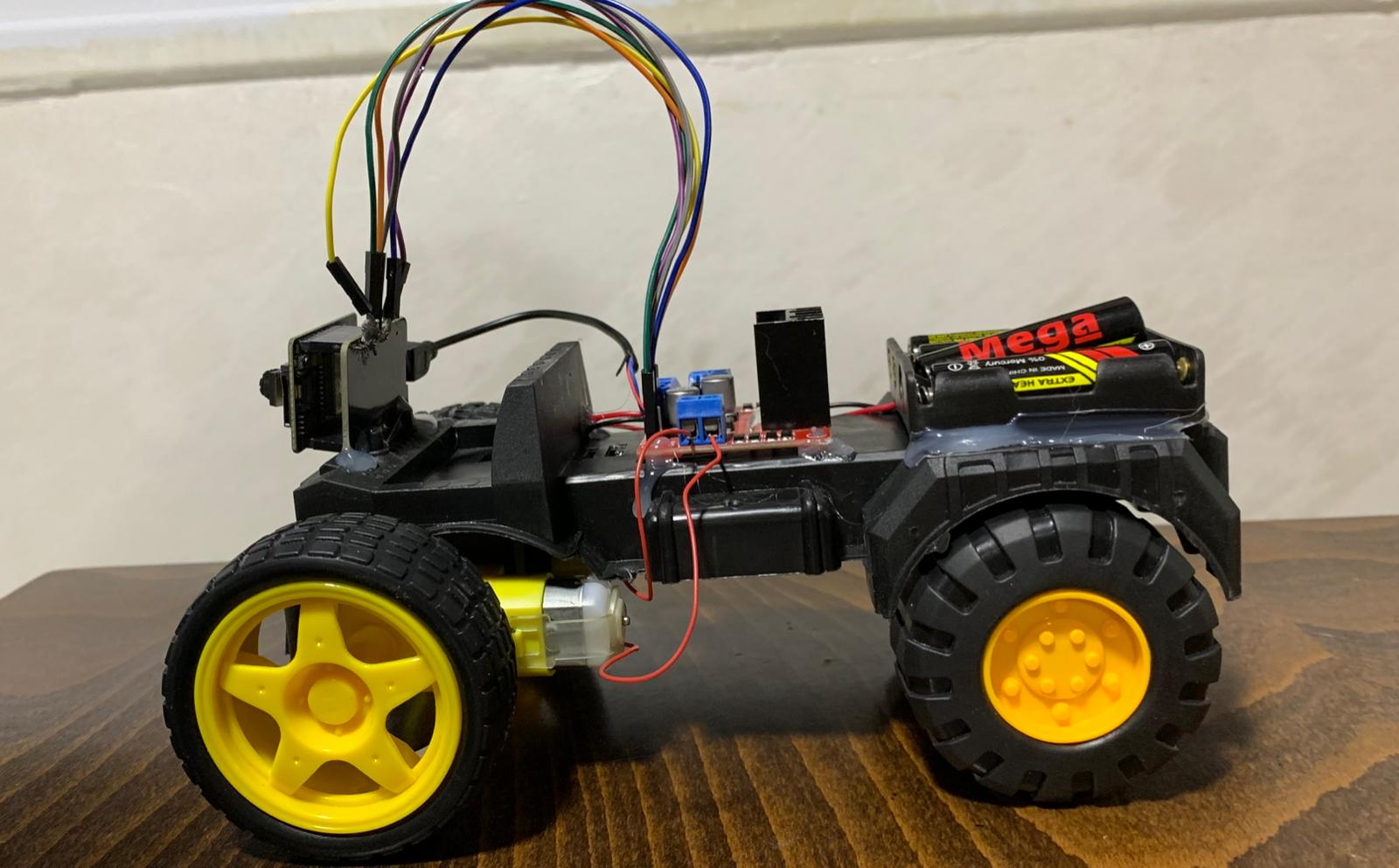
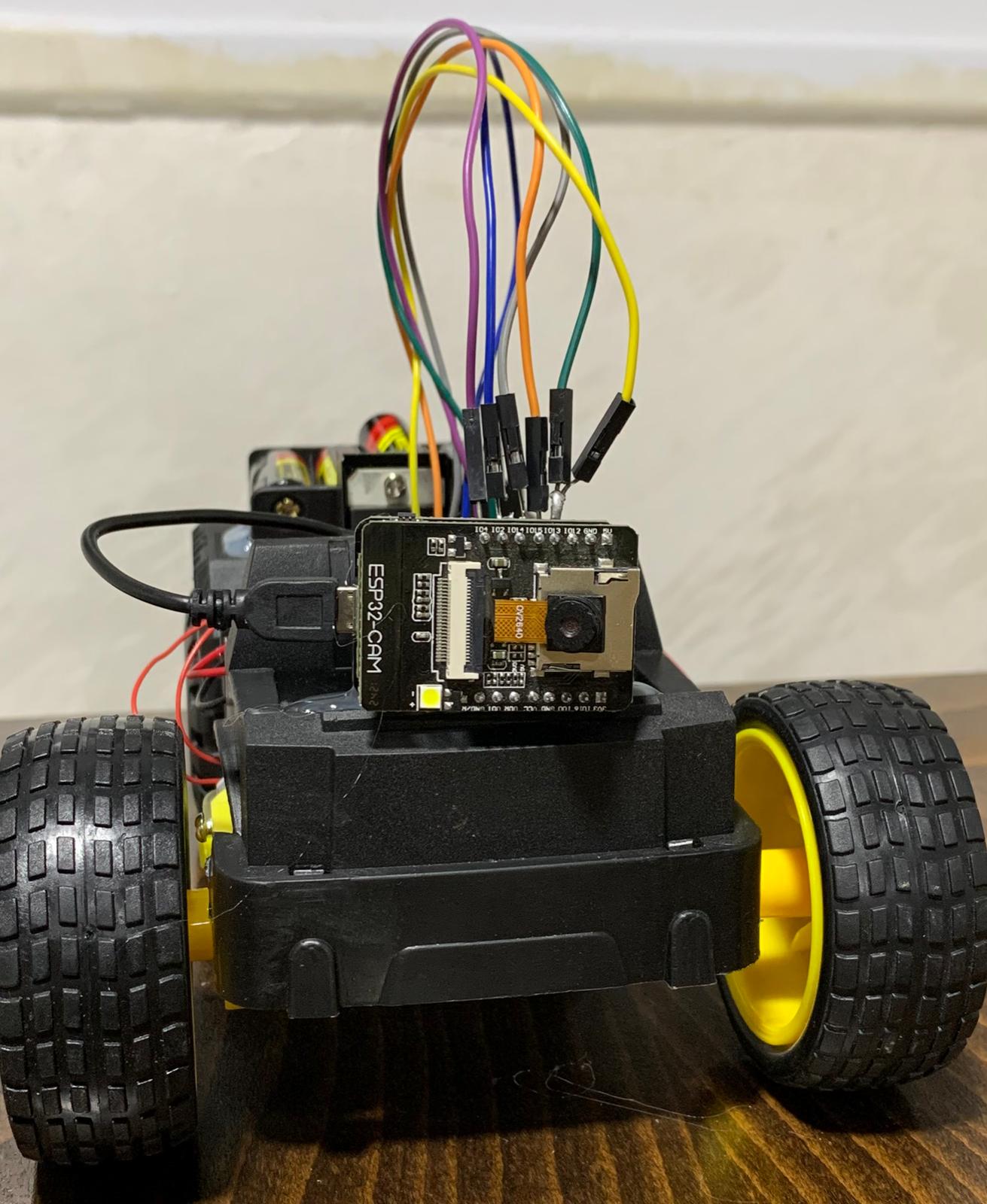
OptiWalk combines real-time video streaming, wireless control, and embedded intelligence into a compact ESP32-CAM powered rover.
Embedded Systems — Final Project
OptiWalk combines real-time video streaming, wireless control, and embedded intelligence into a compact ESP32-CAM powered rover.
What is OptiWalk?
Designed for real-time monitoring and wireless control, OptiWalk delivers professional-grade capability at an accessible price point.
MJPEG stream directly to any browser in real-time with minimal latency.
No app installation needed. Control from any device with a web browser.
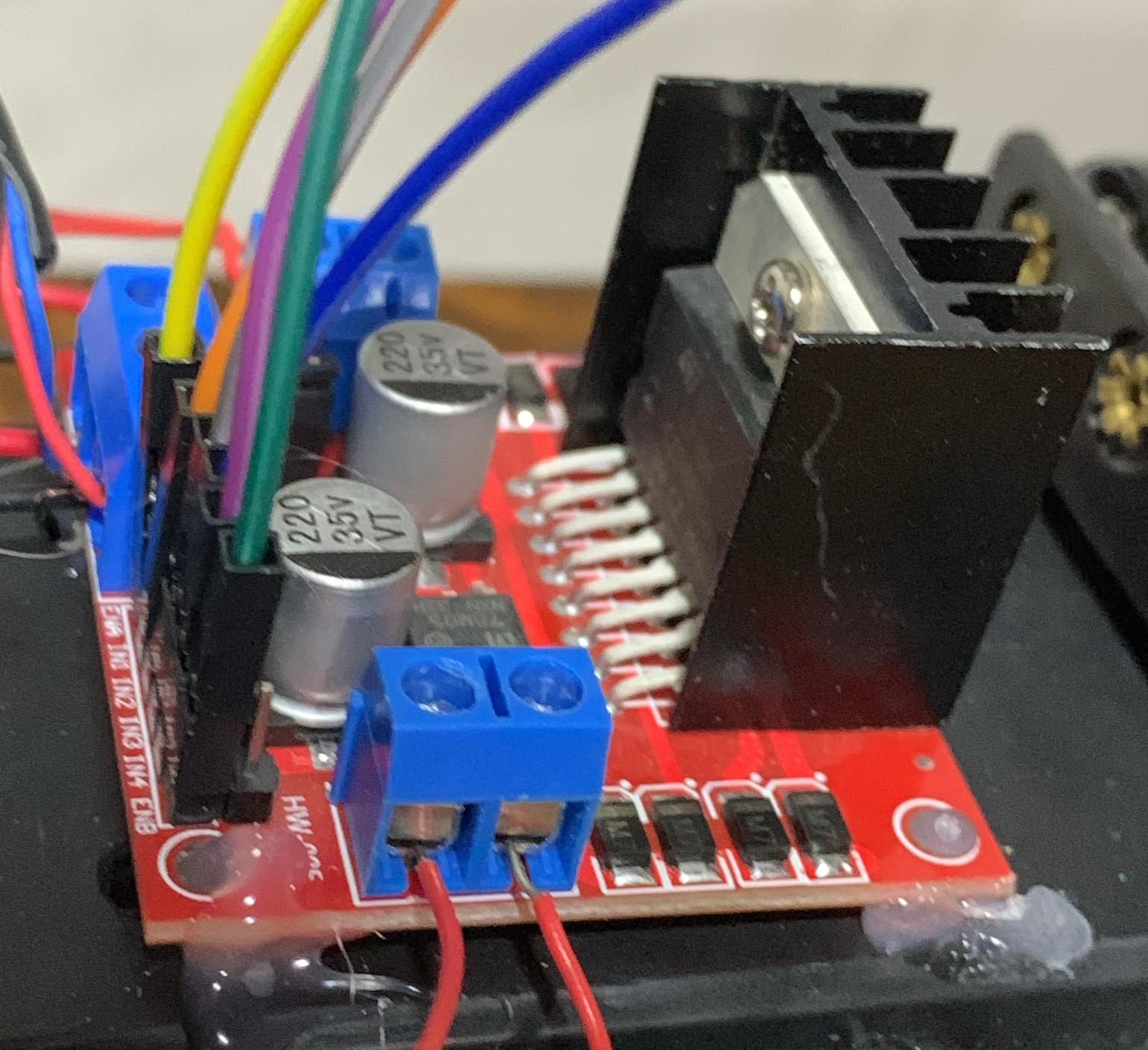
Low-latency PWM motor control for immediate directional response.
Li-Ion battery pack for extended untethered operation.
ESP32 dual-core processor handles camera and motor control simultaneously.
802.11 b/g/n wireless for reliable communication up to 30m range.
System Architecture
Control Path
Camera Stream Path
Capabilities
Continuous MJPEG video stream with adjustable resolution up to VGA quality.
Control from any device — phone, tablet, or desktop — no app required.
Precise motor speed control through pulse-width modulation for smooth movement.
Total build cost of 300 NIS using widely available off-the-shelf components.
Zero installation. Works instantly through any modern web browser.
Perfect for learning embedded systems, IoT, and robotics fundamentals.
Documentation
Components
Benchmarks
Process
Literature review and technology selection
Circuit design and architecture planning
Component assembly and wiring
Arduino IDE firmware and web interface
Performance testing and optimization
Successful demonstration and presentation
The People
Computer Engineering Student
Computer Engineering Student
Project Supervisor
What's Next
Where OptiWalk is headed next
TensorFlow Lite integration for on-device object recognition.
Ultrasonic sensor integration for autonomous navigation.
Path planning algorithms for independent movement.
Remote access and video storage via cloud platforms.
Dedicated Android/iOS app for enhanced control.
Real-time location tracking and geofencing capabilities.
Get Involved
Built with passion. Powered by innovation.